科技计划:
成果形式:新技术、新产品、新装备
合作方式:技术开发、技术服务
参与活动:
2021年高校院所服务苏北五市产学研合作对接活动
首届江苏产学研合作对接大会
专利情况:
正在申请 ,其中:发明专利 3 项
已授权专利,其中:发明专利 1 项
成果简介
综合介绍
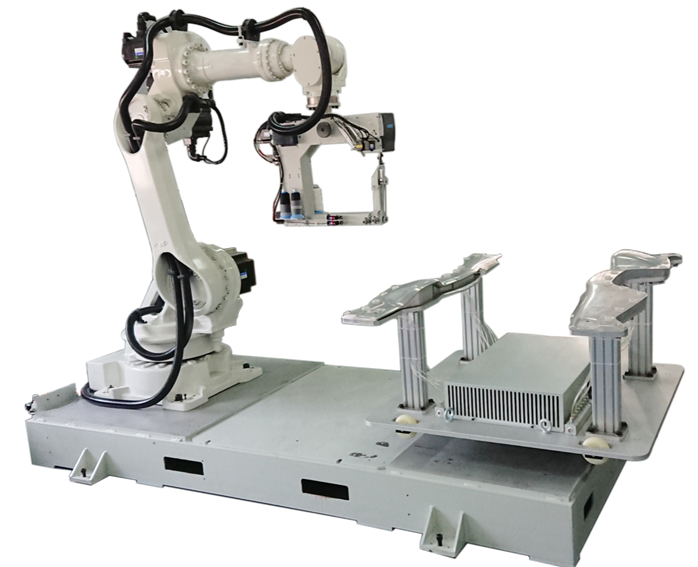
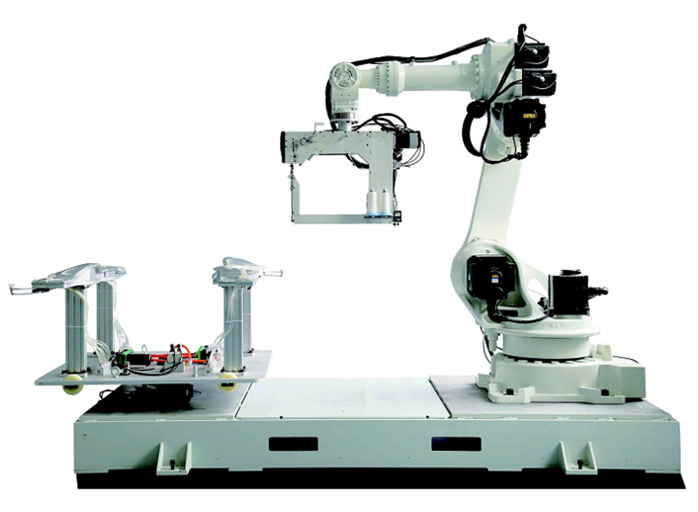
由中国船舶重工集团公司第七一六研究所与宁波慈星股份有限公司联合研制的3D缝纫机器人是一种能够实现复杂曲面的空间视觉检测、全过程自动化缝纫的工业设备。通过将工业缝纫技术与智能制造技术有机集成,利用机器人控制技术、机器视觉技术,解决了复杂曲面的缝纫轨迹自主识别、机器人空间高速高精度缝纫等技术难题。通过将工业缝纫机与工业机器人相融合,可以在空间任意方向进行高速平移和旋转,具备工件自动装夹、缝纫轨迹自主识别、空间变姿态自主缝纫、断线检测、自动剪线以及双工位自动切换等功能,从而完成复杂曲面工件的动态缝纫作业。该产品可用于航空航天装备上的复合材料层间加强缝纫和汽车内饰缝纫,产品综合技术达到国际领先水平。
创新要点
(1)开发了一种基于EtherCAT总线通信的工业机器人及缝纫机协同控制算法,攻克了3D缝纫过程中工业机器人与缝纫机在高速运动过程中的同步性技术难题,取得了高速高精度的缝纫效果;
(2)开发了一种基于线激光传感器的机器人缝纫轨迹离线获取方法,解决了缝纫路径、缝纫速度自动规划的技术难题,免去了人工示教缝纫程序的步骤,提高了缝纫系统的工作效率;
(3)提出了一种缝纫全流程可控的系统集成方案,解决了工件上下料、缝纫故障诊断、缝后处理等功能与缝纫过程的无缝集成的技术难题,将机器人3D缝纫系统打造成为一个低成本、易上手的3D缝纫工作站。
技术指标
功能指标:
1)可缝纫工件类型:树脂基复合材料,普通皮革/布质面料;
2)具备轨迹自主规划功能;
3)具备多针缝纫功能;
4)具备断线检测功能;
5)具备自动剪线功能。
性能指标:
1)缝纫针速:最高1000针/min;
2)视觉扫描相对精度:±0.3mm;
3)缝纫轨迹精度:±0.5mm;
4)可缝纫工件尺寸:最大可扩展至16米级。
其他说明
完成人信息
姓名:对接成功后可查看
所在部门:对接成功后可查看
职务:对接成功后可查看
职称:对接成功后可查看
手机:对接成功后可查看
E-mail:对接成功后可查看
电话:对接成功后可查看
传真:对接成功后可查看
邮编:对接成功后可查看
通讯地址:对接成功后可查看
联系人信息
姓名:对接成功后可查看
所在部门:对接成功后可查看
职务:对接成功后可查看
职称:对接成功后可查看
手机:对接成功后可查看
E-mail:对接成功后可查看
电话:对接成功后可查看
传真:对接成功后可查看
邮编:对接成功后可查看
通讯地址:对接成功后可查看
相关视频
 纪秀林与江苏省生产力促进中心高层次人才与外国专家服务处对接成功
纪秀林与江苏省生产力促进中心高层次人才与外国专家服务处对接成功






 电话:025-85485967 QQ群:1035941228
电话:025-85485967 QQ群:1035941228