科技计划:
成果形式:新技术、新装备
合作方式:技术服务、共建载体
参与活动:
专利情况:
未申请专利
成果简介
综合介绍
奥视佳 (OTHKA )摄像机运动控制系统(简称OTHKA MOCO),是由中国科学院计算技术研究所太仓分所针对影视特效、广告创意、影楼和景点娱乐场所特效拍摄所研制的一种自动控制摄像机运动轨迹的拍摄设备。通过该设备,摄影师可以精确并重复地控制摄像机的运动轨迹,从而拍摄出多种特殊效果,如人物复制、高速拍摄、虚实结合、不同速度混合等。
创新要点
OTHKA MOCO按照预定的运动轨迹精确运行,从而达到摄像机、道具、演员的完美匹配。
OTHKA MOCO按照预定的运动轨迹重复运行,使摄像机能以完全一致的拍摄轨迹和拍摄速度进行拍摄,从而达到重复拍摄的效果,进一步利用视频合成技术,从而得到人物复制等特殊效果。
技术指标
机器人系统 七自由度机器人
控制柜 机器人控制部件
直线轨道 摄像运动控制系统水平移动
云台 放置摄像机
高清数字摄影机 进行高清视频拍摄
计算机 工业级高配计算机
性能参数
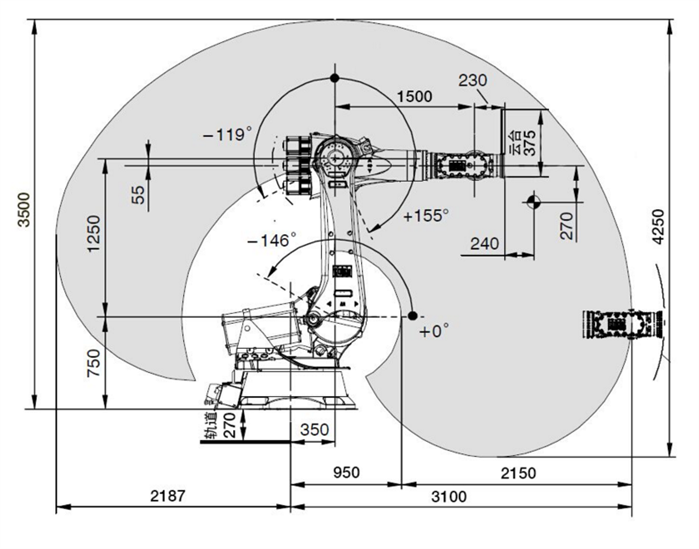
轴 运动范围 最大速度
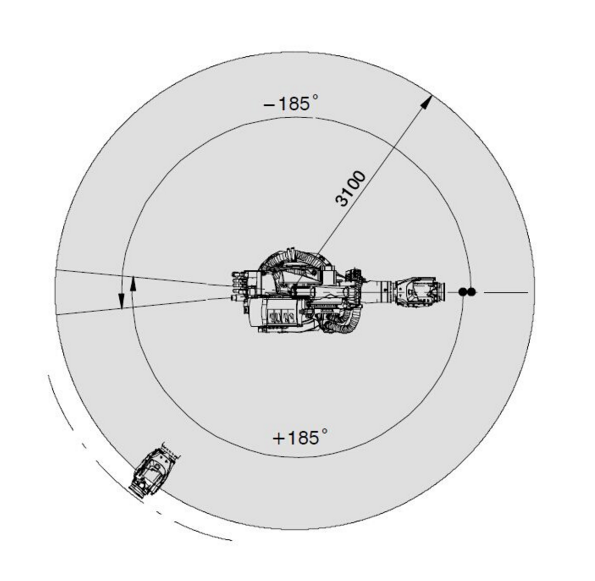
基座旋转 370°(±185°) 105°/s
下臂摆动 146°(0°/-146°) 110°/s
上臂摆动 274°(+155°/-119°) 93°/s
腕部旋转 700°(±350°) 170°/s
腕部摆动 250°(±125°) 170°/s
云台旋转 700°(±350°) 238°/s
重量参数
机器人 1263kg
10米轨道 1350kg(3*450kg)
控制柜 178kg
云台 2.2kg
总计 约2793kg
精度参数
机器人 ±0.12mm
轨道 ±0.5mm
云台 ±0.002°
工作范围
工作空间(不含轨道) 93m3
臂展 3.915m(3.5+0.415)
轨道(定制型) 10m(3+3.5+3.5)
负载参数
云台 50kg
其他说明
完成人信息
姓名:对接成功后可查看
所在部门:对接成功后可查看
职务:对接成功后可查看
职称:对接成功后可查看
手机:对接成功后可查看
E-mail:对接成功后可查看
电话:对接成功后可查看
传真:对接成功后可查看
邮编:对接成功后可查看
通讯地址:对接成功后可查看
联系人信息
姓名:对接成功后可查看
所在部门:对接成功后可查看
职务:对接成功后可查看
职称:对接成功后可查看
手机:对接成功后可查看
E-mail:对接成功后可查看
电话:对接成功后可查看
传真:对接成功后可查看
邮编:对接成功后可查看
通讯地址:对接成功后可查看
 赵金星与江苏省生产力促进中心企业咨询与知识产权服务中心对接成功
赵金星与江苏省生产力促进中心企业咨询与知识产权服务中心对接成功










 电话:025-85485967 QQ群:1035941228
电话:025-85485967 QQ群:1035941228