科技计划:
省部级:Jiangsu
成果形式:新技术、新装备
合作方式:技术转让、技术开发、技术服务、技术入股
参与活动:
2023年高校院所走进镇江产学研合作对接活动
第二届江苏产学研合作对接大会
2023年高校院所服务苏北五市产学研合作对接活动
专利情况:
正在申请 ,其中:发明专利 2 项
已授权专利,其中:发明专利 0 项
专利号:
202310185537.9
成果简介
综合介绍
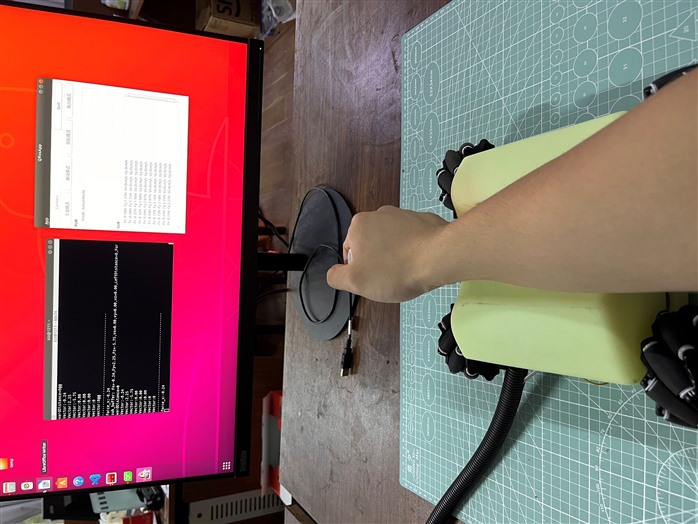
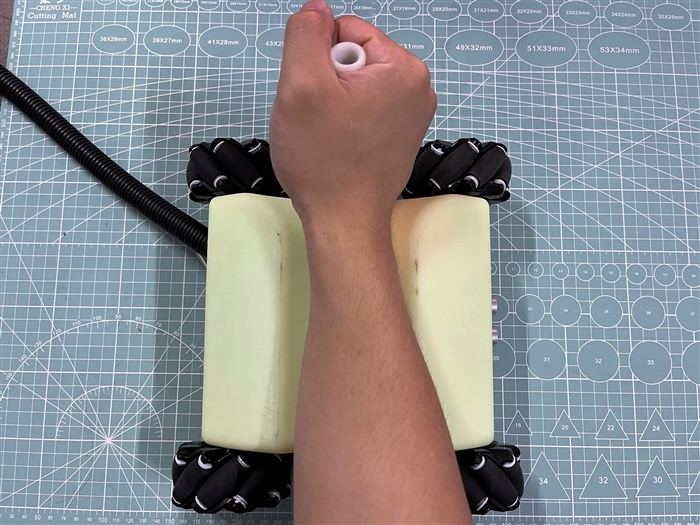
针对脑卒中/阿尔茨海默症患者康复训练需求,基于麦克纳姆轮设计的末端牵引式上肢康复机器人,体积小巧、便携性强;集成肌电传感器和多维力传感器,有效识别训练者的运动意图;融合表情和语音等多通道信号,能实时判断训练者情感状态;能够实现力/力矩反馈及人机协调运动柔顺控制,具有多等级训练强度;能够根据训练者运动意图和情感状态,开展被动主动/阻抗等多种模式的训练。具体技术指标如下:
• 包含生理/语音/表情/姿态等多感知通道;
• 实现力/力矩反馈及人机协调运动柔顺控制,具有多个等级训练强度;
• 具有主动/被动/助力/抗阻等多种训练模式。
创新要点
(1)基于麦克纳姆轮设计的末端牵引式上肢康复机器人,体积小巧、便携性强;
(2)集成肌电传感器和多维力传感器,有效识别训练者的运动意图;
(3)融合表情和语音等多通道信号,能实时判断训练者情感状态;
(4)能够根据训练者运动意图和情感状态,开展被动主动/阻抗等多种模式的训练。
技术指标
具体技术指标如下:
• 包含生理/语音/表情/姿态等多感知通道;
• 实现力/力矩反馈及人机协调运动柔顺控制,具有多个等级训练强度;
• 具有主动/被动/助力/抗阻等多种训练模式。
其他说明
完成人信息
姓名:对接成功后可查看
所在部门:对接成功后可查看
职务:对接成功后可查看
职称:对接成功后可查看
手机:对接成功后可查看
E-mail:对接成功后可查看
电话:对接成功后可查看
传真:对接成功后可查看
邮编:对接成功后可查看
通讯地址:对接成功后可查看
联系人信息
姓名:对接成功后可查看
所在部门:对接成功后可查看
职务:对接成功后可查看
职称:对接成功后可查看
手机:对接成功后可查看
E-mail:对接成功后可查看
电话:对接成功后可查看
传真:对接成功后可查看
邮编:对接成功后可查看
通讯地址:对接成功后可查看
相关视频
 高文通与江苏省生产力促进中心企业咨询与知识产权服务中心对接成功
高文通与江苏省生产力促进中心企业咨询与知识产权服务中心对接成功






 电话:025-85485967 QQ群:1035941228
电话:025-85485967 QQ群:1035941228