科技计划:
成果形式:新技术、新产品
合作方式:技术转让、技术开发、技术咨询、技术服务、技术入股、人才培养、共建载体、其他
参与活动:
2023年高校院所走进镇江产学研合作对接活动
第二届江苏产学研合作对接大会
2023年高校院所服务苏北五市产学研合作对接活动
专利情况:
正在申请 ,其中:发明专利 2 项
已授权专利,其中:发明专利 0 项
专利号:
CN115451949A
CN114152269A
成果简介
综合介绍
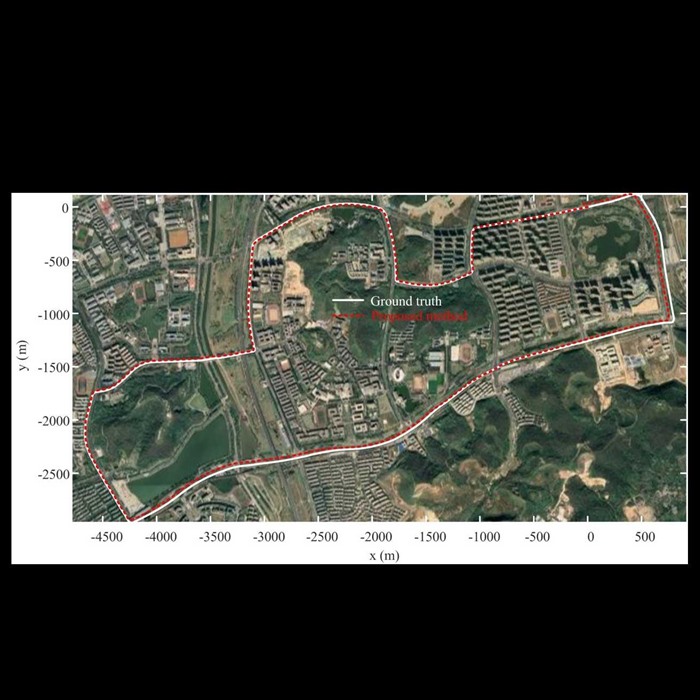
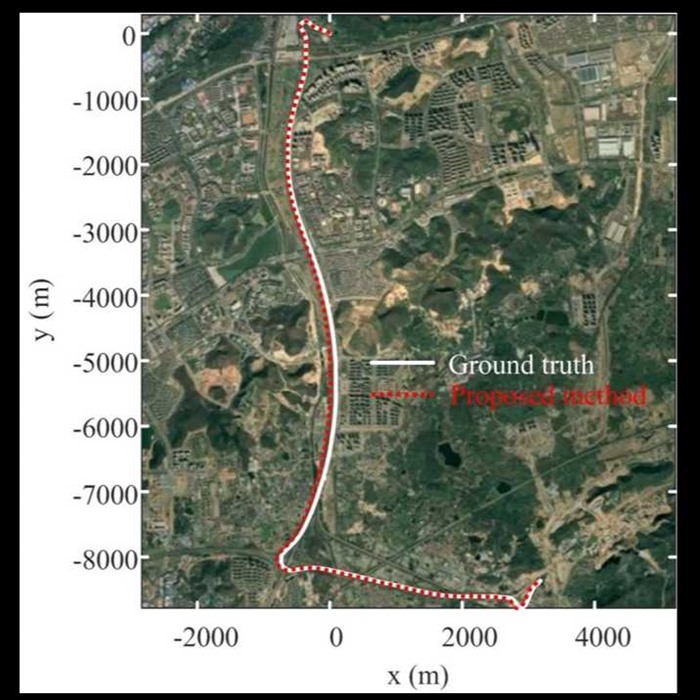
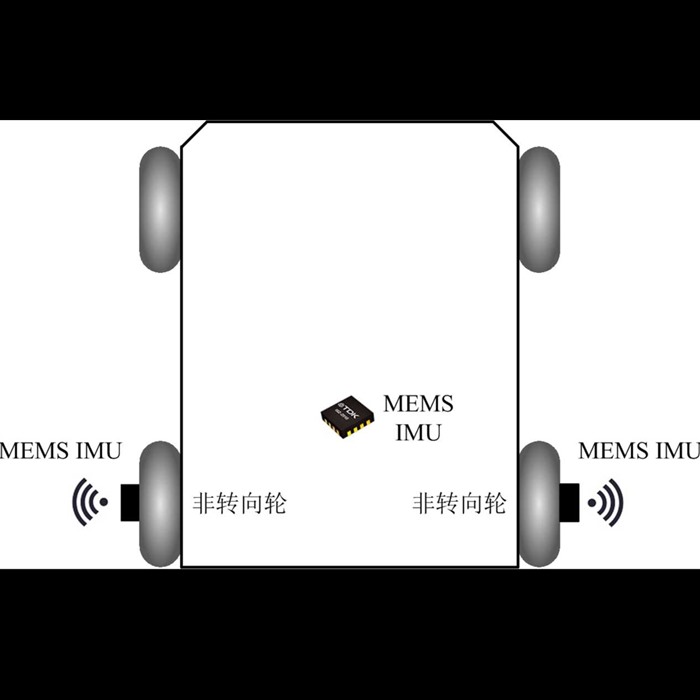
通过将MEMS IMU安装在车轮上,相对于里程计,可以更准确更高频次地测量车辆里程和速度,同时安装方便,此外,通过车辆旋转,根据惯导系统旋转调制效应,有效抑制了陀螺零漂,大幅度提高了基于MEMS IMU的车辆定位精度。本方案适用于在卫星信号遮挡等情况下对车辆、轮式移动机器人的定位。
创新要点
相对已有的车轮安装IMU方案,创新点体现在:
(1)提升基于车轮安装MEMS IMU的车辆定位模型精度;
(2)提出安装误差现场标定方法,使安装更加方便;
(3)使车轮安装IMU方案适用于车辆高速行驶情况。
技术指标
基于单个低成本车轮安装MEMS IMU(零偏不稳定性1°/s)的车辆定位指标为:每公里定位精度8米(每百米定位精度0.8米),每10分钟方位测量精度3°, 适用车辆最大行驶速度大于130 km/h,速度测量精度0.2 km/h,更新频率200 Hz。
基于左轮、右轮、车身各安装一个低成本MEMS IMU(零偏不稳定性1°/s)的车辆定位指标为:每公里定位精度3米(每百米定位精度0.3米),每10分钟方位测量精度1.5°, 适用车辆最大行驶速度大于130 km/h,速度测量精度0.13 km/h,更新频率200 Hz。
其他说明
完成人信息
姓名:对接成功后可查看
所在部门:对接成功后可查看
职务:对接成功后可查看
职称:对接成功后可查看
手机:对接成功后可查看
E-mail:对接成功后可查看
电话:对接成功后可查看
传真:对接成功后可查看
邮编:对接成功后可查看
通讯地址:对接成功后可查看
联系人信息
姓名:对接成功后可查看
所在部门:对接成功后可查看
职务:对接成功后可查看
职称:对接成功后可查看
手机:对接成功后可查看
E-mail:对接成功后可查看
电话:对接成功后可查看
传真:对接成功后可查看
邮编:对接成功后可查看
通讯地址:对接成功后可查看
 赵金星与江苏省生产力促进中心企业咨询与知识产权服务中心对接成功
赵金星与江苏省生产力促进中心企业咨询与知识产权服务中心对接成功








 电话:025-85485967 QQ群:1035941228
电话:025-85485967 QQ群:1035941228