科技计划:
成果形式:新技术、新装备
合作方式:技术转让、技术开发、技术入股、共建载体
参与活动:
2021年高校院所走进镇江产学研合作对接活动
首届江苏产学研合作对接大会
专利情况:
未申请专利
成果简介
综合介绍
伴随全球范围内汽车产业的高速发展以及人们购买力的提升,全球汽车的数量大幅增加,随之出现了诸如交通拥堵、事故频发、环境污染和资源浪费等众多问题,由此出现了无人驾驶的研究热潮。在高等级无人驾驶车成本居高不下,难以全面适应极其复杂环境状态的情况下,针对大型公园观光游览、码头港口的货物搬运等特定场景下既定路径下的无人驾驶市场非常广阔。针对于此,本研究建立了无人驾驶环境感知与车辆控制系统的硬件平台,开发了环境感知与车辆控制的软件算法,可以实现规定场景既定路径下的无人驾驶。
创新要点
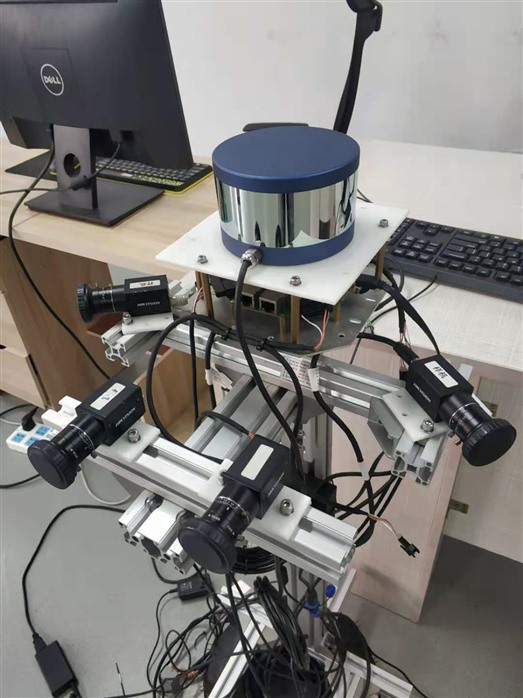
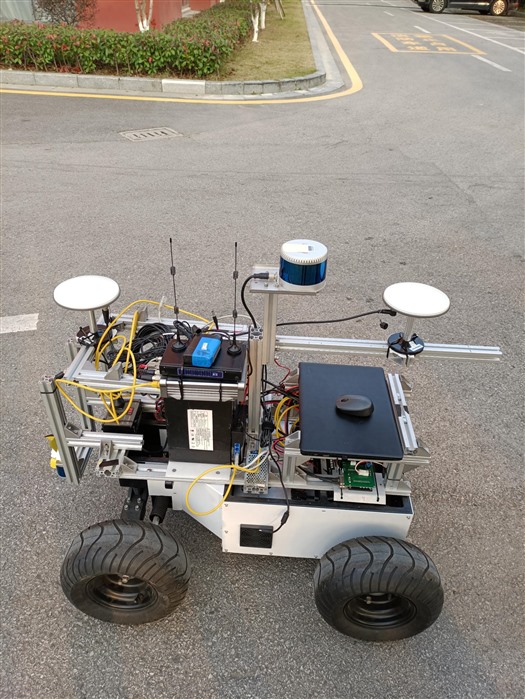
本项目研究内容主要分为车体硬件系统的搭建、感知系统和控制系统的设计、SLAM算法、定位和导航算法、控制算法和环境感知算法等关键技术。首先设计了无人驾驶车辆的整体方案,通过市场调研选用了电动车作为无人驾驶的改装车辆,完成了感知和控制线路的改装,选用了多线的激光雷达、多目摄像头、超声波和IMU作为无人驾驶的感知部件,根据车辆环境感知需要对各传感器的安装位置进行了优化布局。本文设计了无人驾驶车辆的整体方案。首先通过市场调研选用了电动车作为无人驾驶的改装车辆,完成了感知和控制线路的改装,选用了多线的激光雷达、摄像头、毫米波雷达和差分GPS作为无人驾驶的感知部件。基于多传感器信息融合的SLAM算法保证了无人车辆的自主定位和导航,设计了基于SSD网络的车载图像目标识别方案,可以用于车辆前方行人、汽车和自行车等目标物体分类识别,同时为了获得障碍物的深度信息,完成了激光雷达与摄像头的联合标定,经过信息融合,计算出目标障碍物的距离,实现了无人车在驾驶过程中能安全自主避障,最后设计了基于预瞄机制的模糊控制算法用于确保无人车能按照实时规划路线行驶,即实现实时准确路径跟踪。
技术指标
基于上述方法开发的无人驾驶平台,在封闭园区及周边道路进行了实车实验,结果表明无人驾驶平台基于多传感器信息融合的SLAM算法的定位误差在0.1m以内,感知系统可以在障碍物进入预警范围1.5秒内完成避障和制动,确保无人车行驶安全;控制器可以快速稳定地确保无人车在固定路径上自动驾驶,实验的最大横向偏差在0.1m以内,能够确保车辆在当前车道行驶。实验结果表明,可以实现在封闭园区内的低速无人驾驶,满足智能工厂,智慧园区和住宅小区的实际需要。
其他说明
完成人信息
姓名:对接成功后可查看
所在部门:对接成功后可查看
职务:对接成功后可查看
职称:对接成功后可查看
手机:对接成功后可查看
E-mail:对接成功后可查看
电话:对接成功后可查看
传真:对接成功后可查看
邮编:对接成功后可查看
通讯地址:对接成功后可查看
联系人信息
姓名:对接成功后可查看
所在部门:对接成功后可查看
职务:对接成功后可查看
职称:对接成功后可查看
手机:对接成功后可查看
E-mail:对接成功后可查看
电话:对接成功后可查看
传真:对接成功后可查看
邮编:对接成功后可查看
通讯地址:对接成功后可查看
相关视频
 纪秀林与江苏省生产力促进中心高层次人才与外国专家服务处对接成功
纪秀林与江苏省生产力促进中心高层次人才与外国专家服务处对接成功










 电话:025-85485967 QQ群:1035941228
电话:025-85485967 QQ群:1035941228