科技计划:
成果形式:新技术、新工艺
合作方式:技术开发、技术咨询、技术服务、共建载体
参与活动:
专利情况:
未申请专利
成果简介
综合介绍
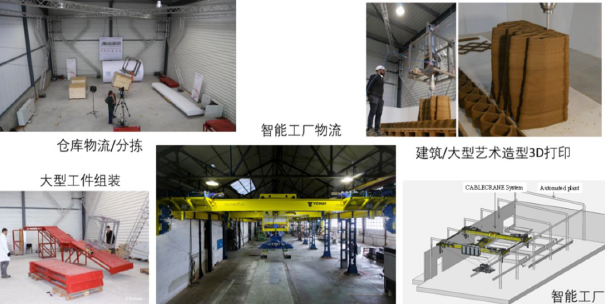
基于并联机器人技术的绳牵引智能行车系统,在超大工作空间中实现工件6个自由度的位置与姿态控制。作为空间定位平台,可围绕柔性生产所需要的物流、组装、喷涂、码垛等场景进行定制化设计与应用。结合手控和自动运行模式,在重型,大型设备高效装配,工厂自动化物流等领域有广泛应用前景。
创新要点
柔性制造的典范:
• 大工作空间内进行重物全位姿定位,搬运操作;
• 高度灵活,配合丰富的应用场景;
• 空间占用小、便于安装拆卸;
• 易于柔性生产厂房规划;
• 以相同机器人设计 对厂房尺寸有一定的兼容性;
• 电机驱动运动件少,维护成本低。
技术指标
柔性制造的典范:
• 大工作空间内进行重物全位姿定位,搬运操作;
• 高度灵活,配合丰富的应用场景;
• 空间占用小、便于安装拆卸;
• 易于柔性生产厂房规划;
• 以相同机器人设计 对厂房尺寸有一定的兼容性;
• 电机驱动运动件少,维护成本低。
其他说明
完成人信息
姓名:对接成功后可查看
所在部门:对接成功后可查看
职务:对接成功后可查看
职称:对接成功后可查看
手机:对接成功后可查看
E-mail:对接成功后可查看
电话:对接成功后可查看
传真:对接成功后可查看
邮编:对接成功后可查看
通讯地址:对接成功后可查看
联系人信息
姓名:对接成功后可查看
所在部门:对接成功后可查看
职务:对接成功后可查看
职称:对接成功后可查看
手机:对接成功后可查看
E-mail:对接成功后可查看
电话:对接成功后可查看
传真:对接成功后可查看
邮编:对接成功后可查看
通讯地址:对接成功后可查看
 纪秀林与江苏省生产力促进中心高层次人才与外国专家服务处对接成功
纪秀林与江苏省生产力促进中心高层次人才与外国专家服务处对接成功






 电话:025-85485967 QQ群:1035941228
电话:025-85485967 QQ群:1035941228