科技计划:
成果形式:新产品
合作方式:
参与活动:
专利情况:
未申请专利
成果简介
综合介绍
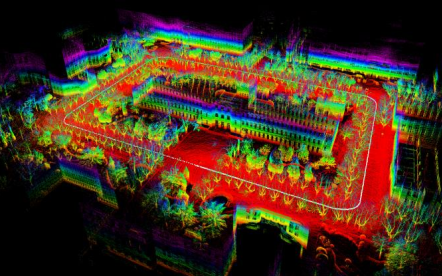
针对现有室内外移动机器人无法自主导航、路径规划及自主感知决策的技术难点。为满足机器人自主导航及自主决策需求,研发了集成激光三维点云数据建模、 三维几何特性估计、点云反射强度估计、点云场景精确匹配、局部环境感知、视觉特征提取匹配、 视觉里程计及视觉导航算法、机器学习与深度学习识别、惯性/视觉/激光多传感器信息融合技术完成的移动机器人自主导航定位、路径规划与避障及目标检测与识别技术。 可在封闭及黑暗环境中提供高精度实时导航定位与路径规划服务,并可采用服务平台实时监控机器人或人体的位置与运动状态。广泛用于消防、医疗、勘察、工厂巡检、井下作业、智慧物流、抢险救灾、侦察等行业。
创新要点
技术指标
①定位精度<1m;
②可根据作业环境选配传感器类型;
③可在室外或室内环境下工作;
④目标检测及识别精度>90%。
其他说明
江苏省三维打印装备与制造重点实验室
完成人信息
姓名:对接成功后可查看
所在部门:对接成功后可查看
职务:对接成功后可查看
职称:对接成功后可查看
手机:对接成功后可查看
E-mail:对接成功后可查看
电话:对接成功后可查看
传真:对接成功后可查看
邮编:对接成功后可查看
通讯地址:对接成功后可查看
联系人信息
姓名:对接成功后可查看
所在部门:对接成功后可查看
职务:对接成功后可查看
职称:对接成功后可查看
手机:对接成功后可查看
E-mail:对接成功后可查看
电话:对接成功后可查看
传真:对接成功后可查看
邮编:对接成功后可查看
通讯地址:对接成功后可查看
 纪秀林与江苏省生产力促进中心高层次人才与外国专家服务处对接成功
纪秀林与江苏省生产力促进中心高层次人才与外国专家服务处对接成功







 电话:025-85485967 QQ群:1035941228
电话:025-85485967 QQ群:1035941228